The Earth-Centered Inertial (ECI) Coordinate Frame
An Inertial coordinate frame is one that does NOT accelerate (rectilinearly) or change its orientation (wrt the
“stars”)-
An Inertial coordinate frame is one that does NOT accelerate (rectilinearly) or change its orientation (wrt the
“stars”)-
- All inertial sensors measure “inertial” motion.
- Gyroscopes measure rate of change of inertial orientation
- Accelerometers measure inertial acceleration.

The ECI frame will be referred to as the i-frame.
The origin of the ECI frame is located at the center of mass of the Earth
- The z-axis points along the nominal axis of rotation of the earth.
- The x-axis lies in the equatorial plane and points from the Earth to the Sun at the vernal equinox
- The y-axis is simply chosen to conform to a right hand coordinate system.
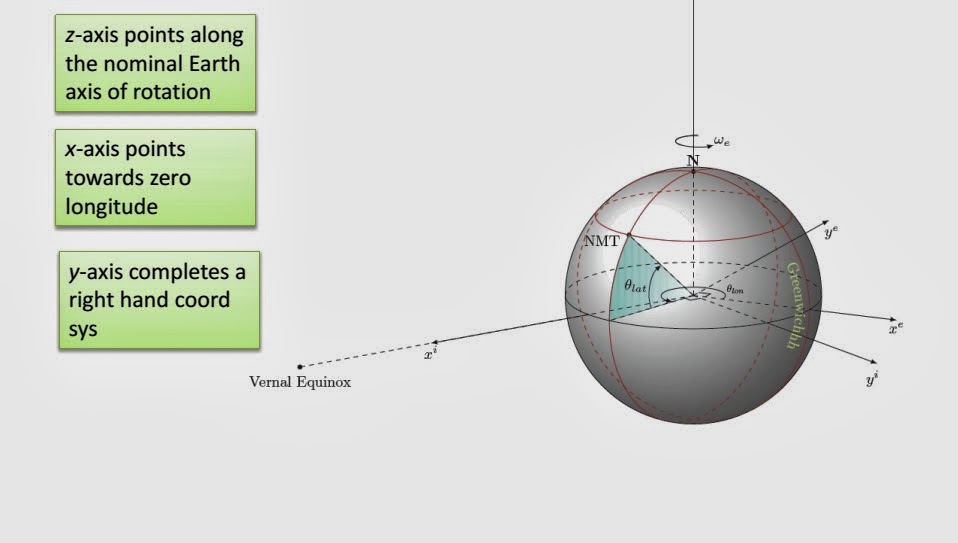
The Earth-Centered Earth-Fixed (ECEF) Coordinate Frame:
- The ECEF coordinate frame is NOT an inertial frame.
- The ECEF coordinate frame is fixed with respect to the Earth.
- The ECEF frame will be referred to as the e-frame.
The ECEF coordinate frame is fixed with respect to the Earth.
The origin of the ECEF frame is located at the center of mass of the Earth (same as ECI)
The origin of the ECEF frame is located at the center of mass of the Earth (same as ECI)
- The z-axis points along the nominal axis of rotation of the earth (same as ECI)
- The x-axis lies at the intersection of the equatorial plane and the reference meridian plane (i.e. Greenwich meridian) Concept of latitude and longitude.
- The y-axis is simply chosen to conform to a right hand coordinate system.

The Local Navigation (Nav) Coordinate Frame:
- The Navigation coordinate frame is typically NOT fixed with respect to the Earth
- The x/y axes lie in a plane which is locally-level or tangential to the Earth’s surface
- The Navigation frame is sometimes called the goedetic, geographic, locally-level, or tangential frame
- The Navigation frame will be referred to as the n-frame.
The Navigation coordinate frame moves with the vehicle of interest.
- The origin of the Nav frame is located at the center of mass of the vehicle
- The z-axis points “down” along the normal to the Earth’s surface
- Approximately towards the center of the Earth
- The x-axis points to the North pole
- The y-axis is simply chosen to conform to a right hand coordinate system
- This configuration is often referred to as a NED frame
x North, y East, z Down
The Body Coordinate Frame:
- The body coordinate frame is fixed with respect to the vehicle.
- The body frame will be referred to as the b-frame.
- The Body coordinate frame is attached to the vehicle of interest.

- The origin of the body frame is located at the center of mass of the vehicle (same as the Nav frame).
- The x-axis points “forward” wrt the movin vehicle.
- The z-axis points loosely “down”.
- Changes with the roll/pitch of the vehicle.
- The y-axis is simply chosen to conform to a right hand coordinate system.

Other Coordinate Frames:
Wander Azimuth Frame (alternative to the Nav frame)
Does not always point North to avoid numerical stability problems near the poles
Other Locally level frames
Tangential Frame
Typically, refers to another type of ECEF frame fixed to the
Earth’s surface (not moving like the n-frame)
Earth’s surface (not moving like the n-frame)
Computer Frame Virtual coordinate frame that represents where we think
that we are.
that we are.
No comments:
Post a Comment